Version 2 was developed after identifying the mechanical and hydrodynamic limitations of the initial architecture.
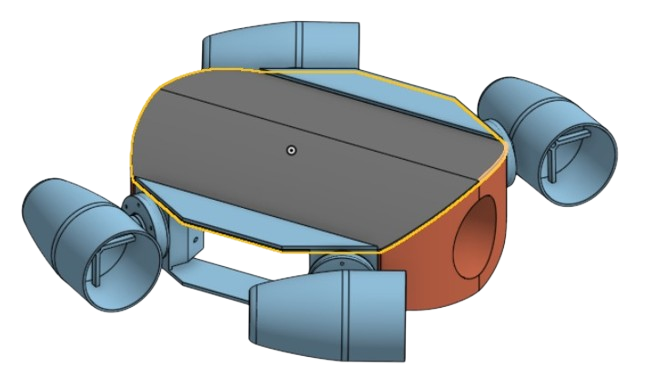
We redesigned the body geometry to reduce frontal area and turbulence, transitioning toward a more compact and streamlined profile. Thruster positioning was re-evaluated to improve vector control while minimizing unnecessary drag penalties.
Through comparative CFD simulations, we validated a substantial reduction in drag coefficient across multiple velocity ranges. The refined structure improved thrust-to-drag ratio, reduced energy consumption, and enhanced maneuverability under sustained motion.
Internal layout was also optimized for better balance, simpler wiring architecture, and improved modularity — making the system easier to scale and maintain.
Version 2 marked the shift from experimental validation to performance-focused engineering — a step closer to a deployable underwater robotic platform.